
3 Boyutlu Akıllı Arduino Robot Kol Yapımı
22-01-2020
16:29
Arduino ile beraber gaz sensörü veya toprak nem sensörünü kullanarak farklı projeler yapabilirsiniz.
Ancak, bu yazıda bahsedeceğimiz robotik kol yapımı; klişelerin dışına çıkmanıza neden olacaktır.
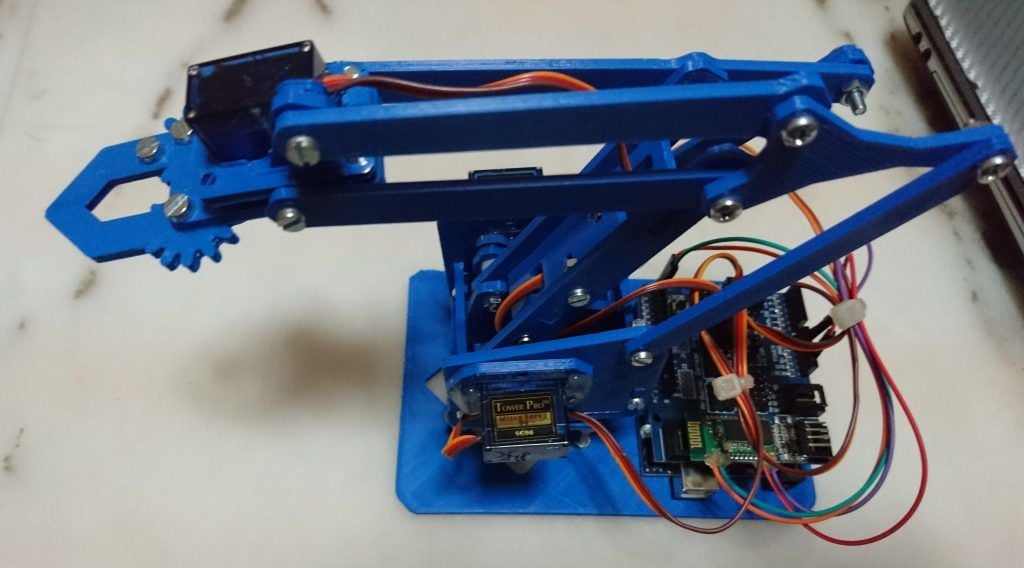
Android işletim sistemine sahip olan cihazlar tarafından kontrol edilebilen bu robot kol; üç aşamadan
meydana gelmektedir. Mobil uygulama, Arduino ve 3D printerdan basılmış mekanik aşamalarını
tamamladığınız takdirde robot kol üretimini sonlandırmış olacaksınız!
Robot Kol Nasıl Yapılır?
Arduino Sensor Shield, Arduino Uno, 5V 3A voltaj regülatör kartı, 4xTower Pro SG90 RC Mini Servo Motor, 12V adaptör, HC-06 bluetooth modülü ve her zaman olduğu gibi devreyi kurma aşaması için jumper kablo gerekmektedir. Robot kol yapımı için ilk olarak MIT App Inventor 2 uygulama geliştirme programında arayüz oluşturmak gerekmektedir. Bu program; sürükle-bırak mantığına göre çalışmaktadır. Bu uygulamayı kullanarak Android cihazın Arduino'ya bağlanan Bluetooth modülüyle eşleştirilmesi işlemi tamamlanmaktadır. Bir başka deyişle, robot kolunun yapım sürecini Android cihaz üzerinden takip etmek mümkün olmaktadır. 1. Yukarıda söylediğimiz gibi MIT App Inventor 2 programında bir uygulama oluşturulmalıdır. Arduino'ya gönderilecek olan Bluetooth sinyalleri; programdaki sliderlar sayesinde kontrol edilmektedir. 2. Bu noktada, Arduino'da bulunan sinyal değerlerinin ne anlama geldiğini bilmek gerekir. Maximum ve minimum value değerlerine bakılmalıdır. 3. Robot kolun tasarımı; kişiye bağlı olarak değişmektedir. 4. Bundan sonraki aşamada 4xTower Pro SG90 RC Mini Servo Motor ile jumper kablolar kullanılarak devre oluşturulmalıdır.
Arduino Programı Nasıl Çalışır?
Robot kol yapımı sırasında Arduino programını kullanmak zorundasınız. Programı kullanırken servo motorları, Bluetooth modülünü ve pinleri tanımak gerekmektedir. Kod yazımından bahsetmek gerekirse; - Void setup kısmında seri iletişimi etkinleştirmek için serial.begin(9600) - Bluetooth iletişim için bluetooth.begin(9600) fonksiyonları yazılmaktadır. Bunun dışında, Bluetooth sinyalleri 1000-1135 arasında ise birinci servo; 0-135 derece arasında kontrol edilmektedir. Sinyaller; 2000-2090 arasında ise ikinci servo; 0-90 derece arasında kontrol edilmektedir. Sinyaller; 3000-3180 arasında ise üçüncü servo; 0-180 derece arasında kontrol edilirken 4000-4120 arasındaki sinyaller için dördüncü servo; 0-150 derece arasında kontrol edilmelidir.
Robot Kol Nasıl Yapılır?
Arduino Sensor Shield, Arduino Uno, 5V 3A voltaj regülatör kartı, 4xTower Pro SG90 RC Mini Servo Motor, 12V adaptör, HC-06 bluetooth modülü ve her zaman olduğu gibi devreyi kurma aşaması için jumper kablo gerekmektedir. Robot kol yapımı için ilk olarak MIT App Inventor 2 uygulama geliştirme programında arayüz oluşturmak gerekmektedir. Bu program; sürükle-bırak mantığına göre çalışmaktadır. Bu uygulamayı kullanarak Android cihazın Arduino'ya bağlanan Bluetooth modülüyle eşleştirilmesi işlemi tamamlanmaktadır. Bir başka deyişle, robot kolunun yapım sürecini Android cihaz üzerinden takip etmek mümkün olmaktadır. 1. Yukarıda söylediğimiz gibi MIT App Inventor 2 programında bir uygulama oluşturulmalıdır. Arduino'ya gönderilecek olan Bluetooth sinyalleri; programdaki sliderlar sayesinde kontrol edilmektedir. 2. Bu noktada, Arduino'da bulunan sinyal değerlerinin ne anlama geldiğini bilmek gerekir. Maximum ve minimum value değerlerine bakılmalıdır. 3. Robot kolun tasarımı; kişiye bağlı olarak değişmektedir. 4. Bundan sonraki aşamada 4xTower Pro SG90 RC Mini Servo Motor ile jumper kablolar kullanılarak devre oluşturulmalıdır.
Arduino Programı Nasıl Çalışır?
Robot kol yapımı sırasında Arduino programını kullanmak zorundasınız. Programı kullanırken servo motorları, Bluetooth modülünü ve pinleri tanımak gerekmektedir. Kod yazımından bahsetmek gerekirse; - Void setup kısmında seri iletişimi etkinleştirmek için serial.begin(9600) - Bluetooth iletişim için bluetooth.begin(9600) fonksiyonları yazılmaktadır. Bunun dışında, Bluetooth sinyalleri 1000-1135 arasında ise birinci servo; 0-135 derece arasında kontrol edilmektedir. Sinyaller; 2000-2090 arasında ise ikinci servo; 0-90 derece arasında kontrol edilmektedir. Sinyaller; 3000-3180 arasında ise üçüncü servo; 0-180 derece arasında kontrol edilirken 4000-4120 arasındaki sinyaller için dördüncü servo; 0-150 derece arasında kontrol edilmelidir.